ROS开发日记 1 ROS基础知识与软件开发入门
欢迎来到我的ROS开发日记系列。在第一篇中,我将分享ROS(Robot Operating System)的基础知识以及如何入手ROS软件开发。ROS是一个灵活的开源框架,专为机器人软件开发设计,它提供了一系列工具、库和惯例,旨在简化复杂机器人行为的创建过程。
一、ROS核心概念
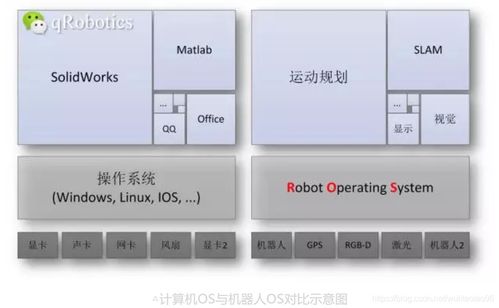
ROS的核心基于节点(Nodes)的概念。节点是ROS中可执行的最小单元,它们通过消息(Messages)进行通信。ROS使用发布/订阅(Publish/Subscribe)模式:节点可以发布消息到主题(Topics),其他节点订阅这些主题来接收数据。服务(Services)允许节点间进行请求-响应式的同步通信。ROS主节点(Master)负责协调节点之间的连接,确保系统正常运行。
二、ROS基础组件
- 工作空间(Workspace):这是ROS项目的根目录,通常使用catkin构建系统来管理。通过创建和配置工作空间,开发者可以编译和运行ROS包。
- 包(Packages):ROS包是组织代码的基本单元,包含节点、库、配置文件等。每个包都有一个package.xml文件,定义依赖关系。
- 消息和服务:ROS使用.msg文件定义消息类型,.srv文件定义服务类型。这些文件在编译时生成对应语言的代码,便于跨节点通信。
三、ROS软件开发入门
要开始ROS开发,首先需要安装ROS(推荐使用Ubuntu系统,并选择LTS版本以确保兼容性)。安装后,创建一个工作空间并初始化:`bash
mkdir -p ~/rosws/src
cd ~/rosws/src
catkininitworkspace`
然后,编译工作空间:`bash
cd ~/rosws
catkinmake`
你可以创建自己的ROS包。例如,使用catkin<em>create</em>pkg命令创建一个新包:`bash
catkincreatepkg myfirstpkg stdmsgs rospy roscpp`
这个命令会生成一个包,其中包含依赖项如stdmsgs(标准消息)、rospy(Python客户端库)和roscpp(C++客户端库)。在包中,你可以编写节点代码。例如,一个简单的Python发布者节点可以发布字符串消息到某个主题。
四、常用工具和命令
ROS提供了丰富的命令行工具来辅助开发:
- roscore:启动ROS主节点,必须首先运行。
- rosrun:运行特定包中的节点。
- rosnode:查看和管理节点。
- rostopic:检查和发布主题消息。
- rosservice:调用和处理服务。
使用这些工具,你可以调试和监控ROS系统,例如通过rostopic echo查看主题上的实时数据。
五、学习建议与资源
作为初学者,建议从ROS官方教程开始(wiki.ros.org),逐步练习节点创建、消息传递和服务调用。同时,多动手实践小项目,如控制模拟机器人或处理传感器数据,以加深理解。ROS社区活跃,遇到问题时,可以查阅文档或参与论坛讨论。
ROS基础知识是机器人软件开发的基石。通过掌握节点、主题、服务和工具,你可以构建复杂的机器人应用。在接下来的日记中,我将深入探讨更多高级主题,如ROS 2、导航栈和仿真。保持学习,期待你的进步!
如若转载,请注明出处:http://www.yvboxes.com/product/11.html
更新时间:2026-06-18 23:00:16